
Authors
Junyi Ji, Alex Richardson, Jonathan Sprinkle, Dan Work
Summary
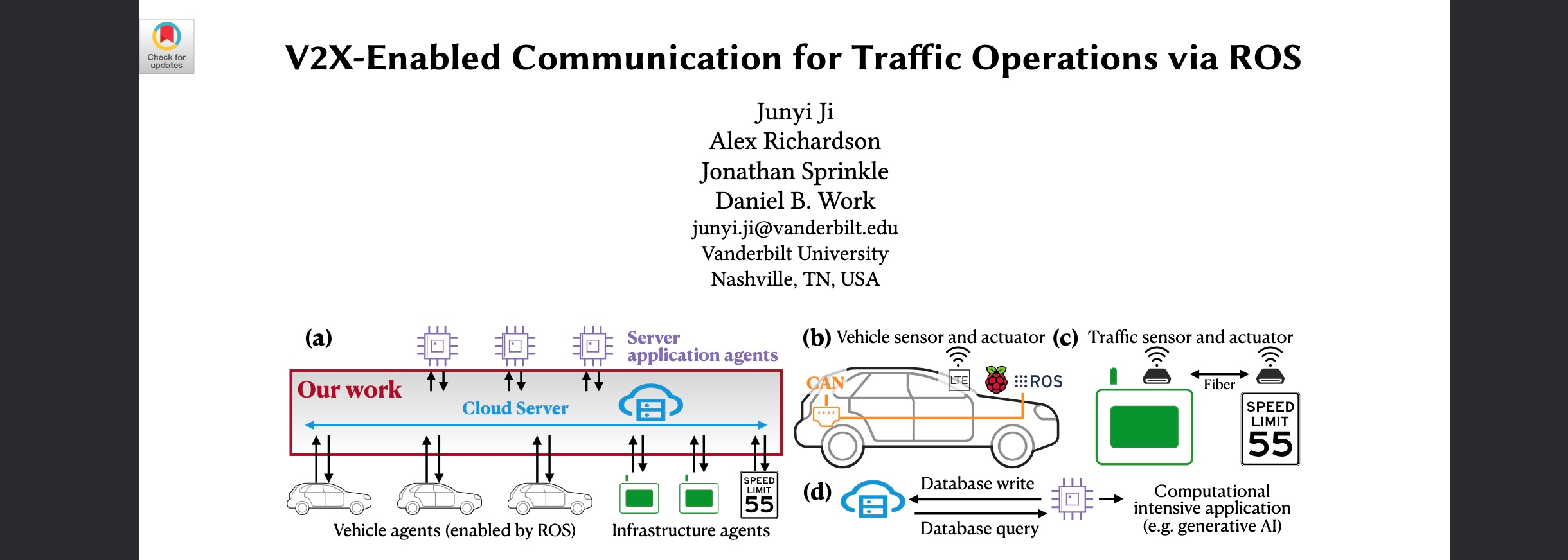
The traffic system consists of vehicular components and road infrastructure across both cyber and physical layers. A key challenge in traffic operations is ensuring effective communication between vehicles and infrastructure. Vehicle data, sampled at around 1 Hz, captures detailed information at many locations but with sparse and intermittent sampling in both time and space. Traffic data, updated about once per minute, covers fewer locations but provides concentrated, more continuous spatial sampling within those limited areas, thus complementing vehicle data by enhancing overall spatial coverage. On the other hand, as actuators, vehicles can also leverage their high-frequency spatial and temporal updates, enabling them to respond to critical traffic events with lower latency than infrastructure systems. Unlike safety-critical Intelligent Transportation Systems (ITS), the majority of traffic-operation-oriented applications are not latency-sensitive (second-level latency is generally tolerable), and therefore do not require a dedicated network for communication. The primary challenge is to ensure that data from other vehicles and traffic sensors can be accurately interpreted and utilized by vehicles. Our work proposes a framework called VECTOR ( V2X-Enabled Communication for Traffic Operations via ROS), which addresses these challenges through a cloud server layer that functions as a data exchange hub for various agents. Agents in VECTOR include vehicle agents, infrastructure (traffic) agents, and server application agents, each of which will be described in detail below. Notably, ROS is primarily used on vehicle agents to manage local operations and enable communication through publishing and subscribing to ROS topics. The proposed framework is highly scalable, supporting a wide range of scenarios and enabling both open-loop and closed-loop testing and experimentation for V2X cooperative traffic operations.