

The rush that washed through me while carrying out this experiment with my team at Vanderbilt is unparalleled. We deployed ~100 cars on the Nashville I24 freeway during morning rush hour with a variety of cruise control solutions with the aim of making traffic faster and safer. Each of these 100 cars had their cruise control systems hotwired and controlled by a Raspberry PI. Each PI received speed recommendations from a remote web server, and using a variety of controller and Reinforcement Learning models managed the traffic around it. I wore many hats during the experiment – but I’ll make sure to show you the highlights.
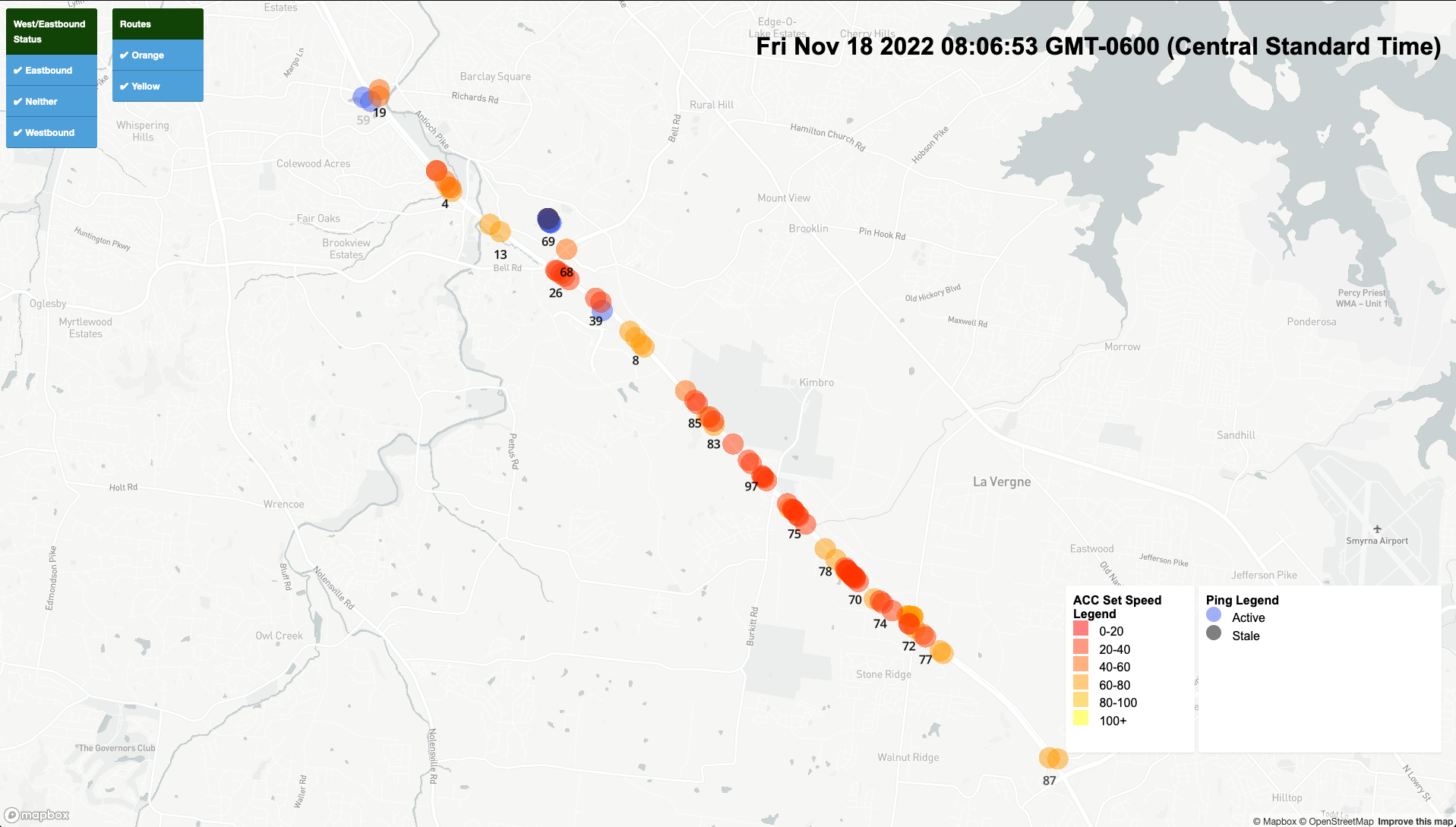
First, we needed a live web app to track the cars and the volunteers in them – this way, we can keep everyone safe, show stakeholders what we were doing, and show to ourselves the true scale of our work! This web app was entirely my doing.

Secondly, the Ubuntu/ROS software on the PIs needed constant rewriting and revising. To that end, I served key roles:
- Designed the communication software between the PIs and the Web Server – both for implementing the traffic mitigation solution’s communication needs in realtime, and for collecting telemetry for post-experiment analysis.
- Implemented the middleware software so that we could deploy RL controllers from UC Berkeley that controlled the Cruise Control speed of the PI’s car. The RL controllers were trained and tested in simulation at Berkeley, but I served as the one with the domain knowledge to actually deploy them on the PIs.
- Me and a couple of other colleagues also imaged and deployed the 100+ Raspberry PIs onto the fleet. This came with several interesting challenges we solved: ensuring all PIs shared the same software, replacing failed SD cards (happened too often), and more!
All of this work was profoundly exhausting – for all of us! A common sight at field HQ at 5:30 AM was me asleep on a couch – being awakened, solving an emergent issue with the fleet – and then going back to sleep. My greatest admiration goes out to my advisor, Jonathan Sprinkle, and the other professors. They worked tirelessly, beyond what I thought possible, to make this a reality. I mixed with dozens of researchers from all over the world. It felt like a dream come true.
But, not all was yet done. I devised a final special treat for our research consortium. You see, each car had a dashcam on it, for liability and research purposes. However, it wasn’t properly time-synchronized nor paired with the telemetric files our vehicles created during each driving session. We collected hundreds of hours of valuable video data of our fleet driving on the highway, and yet on a frame-by-frame basis, there wasn’t any telemetry to associate it with!
I solved that problem – with an optical flow-based program, and dozens of hours of me reviewing the footage, I gave back to our team 532 hours of synchronized and paired dashcam/telemetry data – which has been helpful to us ever since.
